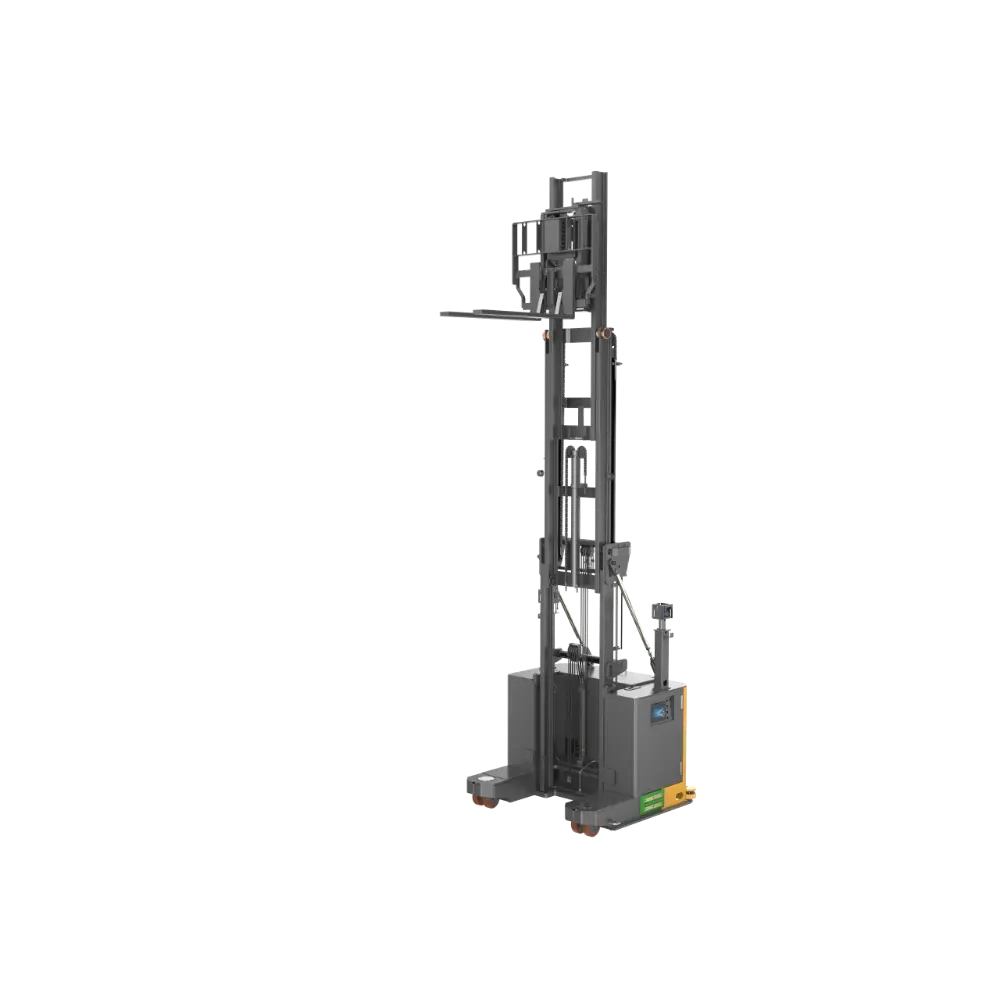
| TECHNICAL PARAMETERS ● Standard ○ Optional -Not available |
أساسي
حدود |
رقم الموديل. |
X5-MR10 |
M5-MR15 |
| سعة التحميل |
كيلوغرام |
1000 |
1500 |
| المسافة بين مركز التحميل |
ج(مم) |
600 |
600 |
| الوزن (شامل البطارية) |
كيلوغرام |
3175(5.5m Mast) |
3175(8m Mast) |
| شوكة (الطول × العرض × الارتفاع) |
16*e*s(mm) |
1170*132*45 |
1170*132*45 |
| المسافة الخارجية للشوكة |
ب5 (مم) |
478-818 |
478-840 |
| Forward Reach Distance |
14(mm) |
550 |
550 |
| أقصى ارتفاع للرفع |
h2 (مم) |
5500(standard)/6000/6500/7000/7500/8000/8500/9000/9500 |
| انخفاض ارتفاع الصاري |
h1 (مم) |
2890/3060/3225/3390/3560/3720/3890/4050/4220/4385 |
| Max.Vehide Height |
h1'(mm) |
2321 |
2321 |
| Overall Length (incl.fork 1200) |
I1(mm) |
2580 |
2450 |
| عرض الهيكل |
ب1 (مم) |
1880 |
2050 |
| الحد الأدنى للارتفاع عن الأرض |
م2 (مم) |
50 |
65 |
| نصف قطر الدوران الأدنى |
وا (مم) |
1820 |
1730 |
| Wheels:Drive/Load (X=Drive Wheel) |
|
2X12 |
2X/2 |
| Min.Safety Distance |
أ (مم) |
400 |
400 |
| Min.Turning Aisle Width(1200×1200 along fork) |
مم |
3360 |
3270 |
| Stacking Aisle Width(1200×1200 along fork,200 clearance) |
مم |
2980 |
2850 |
| ارتفاع الشحن |
مم |
200 |
200 |
| نوع محرك الأقراص |
|
Dual Steering Wheel Drive |
Dual Steering Wheel Drive |
| وضع الحركة |
|
Omni-directional |
Omni-directional |
| Travel Speed(Loaded/Unloaded) |
آنسة |
0.8/1.2 |
0.8/1.2 |
حركة
أداء |
Max.Gradeability(Loaded/Unloaded) |
% |
3/5 |
3/5 |
| Positioning Accuracyuracy |
مم |
±10 |
±10 |
| دقة الزاوية |
° |
±1 |
±1 |
| سرعة الرفع (مع حمولة/بدون حمولة) |
مم/ث |
280/320 |
280/320 |
| Lowering Speed (Loaded/Unloaded) |
مم/ث |
320/250 |
320/250 |
| دقة ارتفاع الرفع |
مم |
±5 |
±5 |
| مشفر سلكي |
|
● |
● |
| مصد نهاية الأسطوانة |
|
● |
● |
| رفع/خفض إلكتروني ناعم |
|
○ |
○ |
| Rated Voltageoltage |
V |
48 |
48 |
| Battery Capacityacity |
آه |
320 |
320 |
| تسخين البطارية بدرجة حرارة منخفضة |
|
○ |
○ |
بطارية
أداء |
دورات الشحن |
|
شحن وتفريغ كامل ≥ 3000 مرة |
شحن وتفريغ كامل ≥ 3000 مرة |
| مدة التشغيل (في الظروف المقدرة) |
h |
4-6 |
4-6 |
| Charging Time(30-90%) |
h |
2 |
2 |
| وضع الشحن |
|
الشحن الجانبي |
الشحن الجانبي |
| الكشف عن العوائق بالليزر الأمامي الأحادي |
|
○ |
○ |
| نظام الكشف عن العوائق بالليزر المزدوج الأمامي |
|
● |
● |
| الكشف عن موضع الشحنة |
|
○ |
○ |
أمان
حماية |
تحديد هوية المنصات |
|
○ |
○ |
| وحدة الوزن |
|
- |
- |
| مسجل القيادة |
|
○ |
○ |
| نظام الكشف عن مصدات الأمان |
|
● |
● |
| نظام الكشف عن وضعية المنصة |
|
● |
● |
| الكشف الكهروضوئي لطرف الشوكة |
|
● |
● |
| أفضل نظام مضاد للتصادم |
|
○ |
○ |
| زر إيقاف الطوارئ الأيسر/الأيمن |
|
● |
● |
| Tri-color Light &Buzzer |
|
● |
● |
| Laser SLAM Navigation |
|
● |
● |
| Laser Reflector |
|
○ |
○ |
| الملاحة الهجينة المرئية بتقنية SLAM |
|
○ |
○ |
| آحرون |
شاشة عرض 10 بوصة |
|
● |
● |
| Handle Operation |
|
- |
- |
| وحدة تحكم سلكية |
|
○ |
○ |
| تطبيق الهاتف المحمول |
|
● |
● |
| قارئ RFID |
|
○ |
○ |
| ضوضاء العمل |
ديسيبل |
≤75 |
≤75 |
| البيانات المذكورة أعلاه مستمدة من النتائج التي تم الحصول عليها من خلال الاختبارات التي أجراها فريق اختبار الروبوت XGEN. |